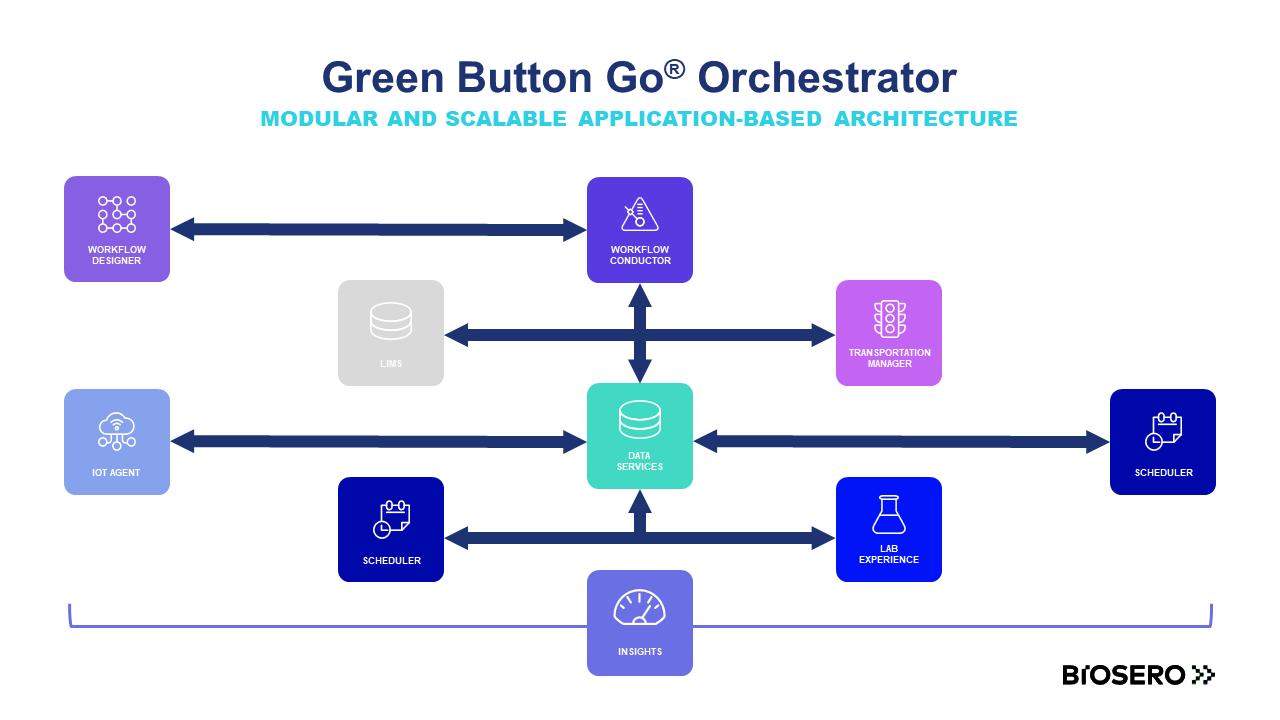
Multipath Scheduler
Multipath Scheduler
Schedule and control multiple robots and transport systems simultaneously
Overview
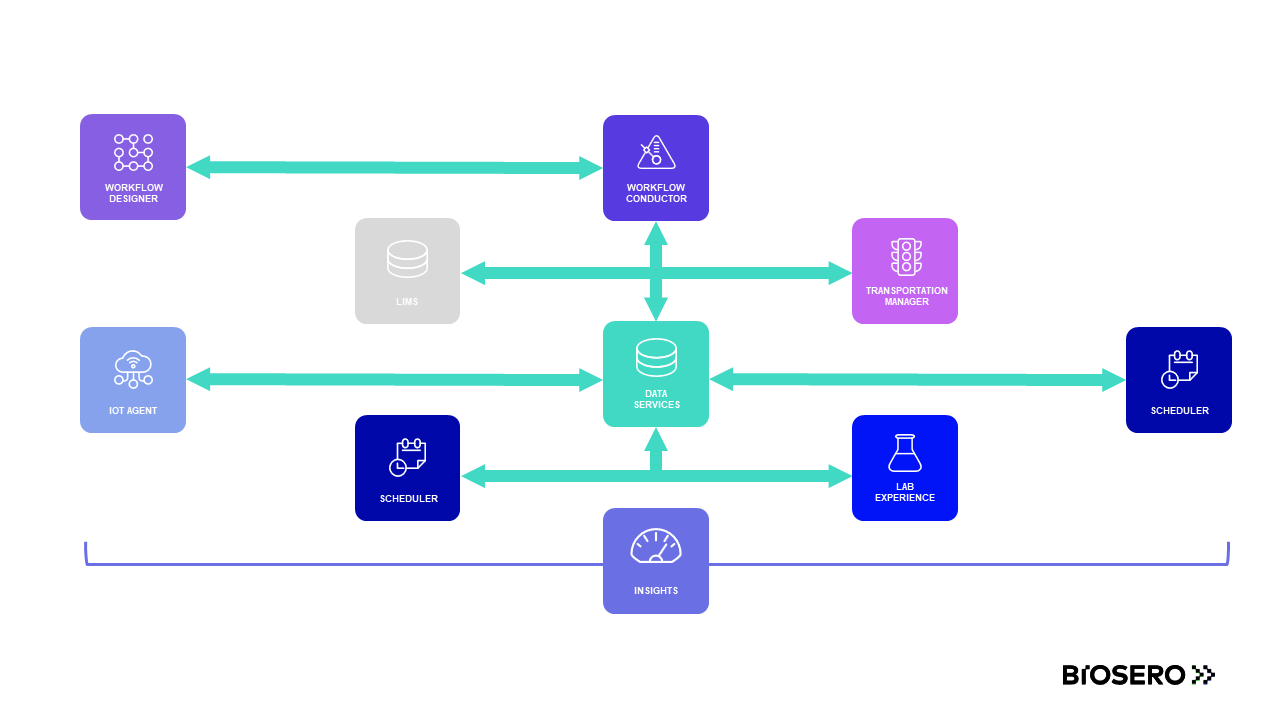
The Multipath Scheduler extension builds on the base functionality of Green Button Go Scheduler software to provide users with more advanced tools for moving samples through the lab.
With this tool, users can plot several trajectories for different plates that will be run simultaneously and identify the optimal path for each plate. Users can also schedule and control multiple robots and transport systems to work simultaneously and in coordination with each other to move samples, materials, and compounds from one part of the lab to another.
Explore other GBG Scheduler Extensions
Highlights
- Define optimal routes for movement of materials around platform based upon multiple sample and instrument access strategies
- Track samples to the same or different instruments in the lab as needed to avoid bottlenecks
- Program multiple transport systems such as mobile robots, robotic arms, and track-based conveyors to work simultaneously or in coordination
- Enable dynamic workflow efficiency